|
履带消防水炮车遥控系统

收藏
产品概述
1 系统特点1.1 实时双向通讯支持反馈车辆底盘及装备的运行数据,用于实现一些动作的自动化、远程监视车辆的关键运行状态; 1.2 线性霍尔摇杆无运动触点的模拟量线性霍尔摇杆寿命更长,运动更顺滑; 矢量摇杆技术:依赖线性摇杆可靠的数据可以输出矢量控制数据,使得控制更精准; 无线距离远:大功率高、灵敏度的射频系统,使得通讯距离更远,更可靠,穿越障碍能力更强,抗干扰能力更强; 1.1 射频跳频技术依赖射频跳频技术,能避免同频信号干扰、其他EMC干扰、改善无线电的多路径效应等等干扰因素,使得无线通讯有更好的健壮性; 1.2 CAN总线使用接收机的CAN总线,接收机系统可直接控制直流无刷电机驱动器。接收机内置定制化的电机驱动策略和算法,可省去PLC,节约系统成本,减少车辆空间占用和重量,使得系统集成度更高,故障率降低、维护更简单; 1.3 Modbus总线接收机自带Modbus总线,可高效的连接各种Modbus总线的传感器、扩展执行部件; 集成更多传感器:通过系统的CAN总线和Modbus总线双管齐下,可以集成更多的总线传感器,能测量各种物理量:运转角度、旋转速度、受力和称重、电压和电流等等传感器,为系统自动控制算法提供更多数据来源;
2 组件线缆定义2.1 角度传感器红色:DC +5V(±5%) 黑色:0V(GND) 白色:485A 绿色:485B 2.2 行走电机驱动请参考KYDBL4875-2E说明书 2.3 旋臂电机驱动请参考KYDBL4830-2E说明书 2.4天线接口天线接口在设备顶端,标准N口母头,连接专用电缆线延长到天线。 2.5 电源/RS485接口电源和RS485接口在设备下端左侧。 电源:红色:供电正极,黄绿色:供电负极。有反接保护。 供电电压范围:12-36V RS485接口:蓝色:RS485A,棕色:RS485B 2.6 CANOpen接口蓝色:CANH,棕色:CANL 3 错误提示当遥控器和接收机联机后,遥控器显示器上可以显示车载系统的一般故障代码,以方便安装调试时检查错误。 3.1 遥控器欠电遥控器严重欠电时会导致遥控器停止工作,但在停止之前,遥控器会自动发出最后一组急停指令,旨在停止车载系统的工作。 遥控器显示:E901 表示遥控器欠电。 3.2 遥控器摇杆故障当按遥控器的联机键联机时,如果遥控器的摇杆或钮子开关不在自由状态,即自恢复状态,遥控器将进入此故障提示模式,以防止意外触发车载系统动作。 遥控器显示:E902 表示摇杆拨杆故障。 3.3 车载系统有线网路错误车载系统有线网络有两种,RS485 和 CANOpen。RS485网络连接继电器模块和两个角度传感器;CANOpen网络连接两个双电机驱动器,控制4个电机的动作。 遥控器显示:E8** “**”为16进制数,需要将其转变为2进制来表达错误信息。 Bit0:角度传感器3号连接失败 Bit1:角度传感器4号连接失败 Bit2:行走电机驱动器连接失败 Bit3:机械臂电机驱动器连接失败 Bit4:继电器模块连接失败 举例说明:
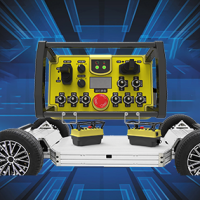
4 部件及动作说明
相关商品
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||